產品與解決方案/PRODUCT AND SOLUTIONS
少用電 用好電 再生電 存儲電 防爆電
解決方案
交流異步電動機變頻-工頻切換的探討
1.
問題的提出
為減少電機啟動電流對電網的沖擊和擺脫電網容量對電機啟動的制約,有用戶提出用變頻器啟動,升到50Hz后切換至工頻,變頻器再去啟動其它電機。雖然這種切換思想備受爭議,但卻在一些場合得到了一定的應用,如:一拖多的供水控制系統、拉絲機系統、鉆機系統等
。
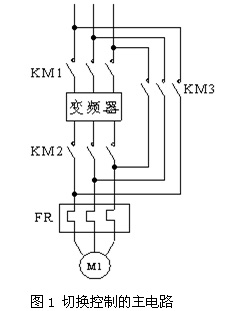
變頻運行的電動機切換成工頻運行的主電路如圖1所示。切換的基本過程只有2個:
(1)
斷開接觸器KM2,切斷電動機與變頻器之間的聯系;
(2)
接通接觸器KM3,將電動機投入到工頻電源上。
根據上述兩個過程的先后順序的不同,而有兩種切換方式:“先投后切”和“先切后投”。
先投后切的切換方式只能用在具有同步切換控制功能變頻器中,這種方法在中、高壓變頻器中得到了成功的應用。而現在低壓變頻器普遍采用的是兩電平的主回路結構,正是這種主電路結構決定了其不能采用先投后切的控制方式只能采用先切后投的控制方式。
做電機工變頻轉換時大多會遇到過這樣的情況:電機由變頻運行狀態直接向工頻運行狀態切換時有時會產生特別大的沖擊電流,能達到其直接啟動電流的兩倍,約為其額定電流的十四五倍,但有的時候卻幾乎沒有電流沖擊;而斷開變頻一段時間后再轉向工頻時就不會再出現太大的沖擊電流,延時的時間越長出現的沖擊電流的峰值就會越小。這是為什么呢?
2.問題的分析
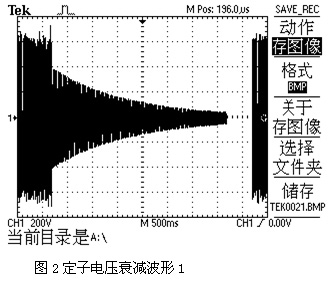
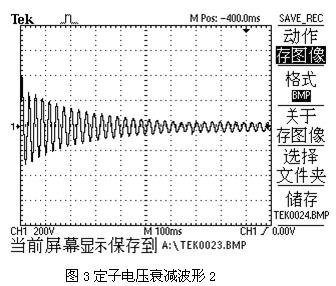
三相電動機正常運行時,以同步轉速旋轉的主磁場在定子三相繞組內感應對稱的三相電動勢。若斷開電源后,主磁場消失,但曾經被主磁場磁化的轉子鐵芯依然存在剩磁,與此同時由于慣性轉子依然高速旋轉,在定子線圈產生的感應電動勢并不會在極短的時間內消失,只是有所衰減。圖2是一37KW電機兩相之間,在斷開變頻器輸出前、后的的定子繞組的電壓波形,由此可看出,斷開電源后定子線圈的感應電動勢逐漸衰減的過程。圖3是圖2的展開,仔細觀察該圖可以看出,隨著轉速的降低,轉子繞組電壓頻率也在緩慢的下降。
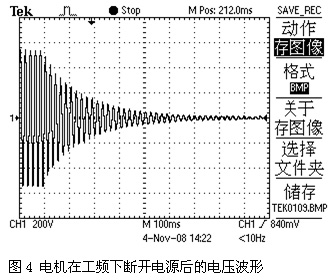
由于變頻器輸出的是PWM波,其相位不易觀察,測得在工頻狀態下的電壓波形進行進一步的分析。因為變頻器50Hz時的輸出電壓與工頻電壓作用在電機上基本時等效的,并不影響分析結果。圖4是一2.2KW電機在工頻電源下突然斷開電源后的電壓波形圖,由該圖可以看出,電壓波形沒有跳變,所以斷開瞬間感應電動勢與電源電壓是同相位的,其幅值也是基本相等的。隨著剩磁的慢慢消失,電壓幅值逐漸降低,同時伴隨著轉速的降低感應電動勢的頻率逐漸下降,其相位也逐漸與電源相位拉開。頻率越低,單位時間內拉開的相位差也就越大。
據此,繪出斷電后電機感應電壓Ud在極坐標下衰減的向量示意圖,如圖5中Ud所示。
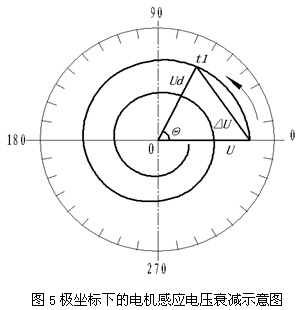
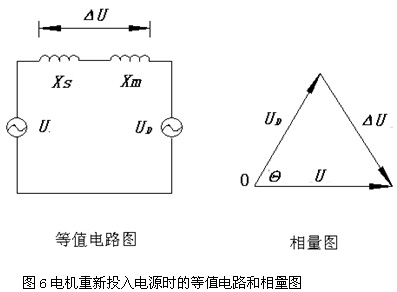
從圖4和圖5中可以看出,瞬間斷開電源后,電機感應電壓有所衰減,同時感應電壓與工頻電源電壓的相位已開始拉開,不同時刻投入工頻電源,將會產生不同的△U。圖6是電機重新投入電源時的等值電路和相量圖。
圖中
U工頻電源電壓
Ud電動機定子線圈的感應電動勢
△U壓差
Xs電源等效電抗,包括線路和前級變壓器
Xm電機等效電抗
θ工頻電源電壓與電動機定子線圈的感應電動勢兩者之間的夾角
△U就是系統和電動機共同承受的電壓。切換瞬間電動機所承受的電壓為
Um,Um=△U×Xm/(Xm+Xs)。為設備安全考慮,可把電動機所承受的電壓控制在1.2倍電動機的額定電壓(UN),即
Um=△U×Xm/(Xm+Xs)≤1.2UN
取Xm/(Xm+Xs)=0.9
則△U≤1.2UN
/0.9=1.33UN≈1.33U
如忽略感應電壓幅值的變化,則θ應小于83.4°。
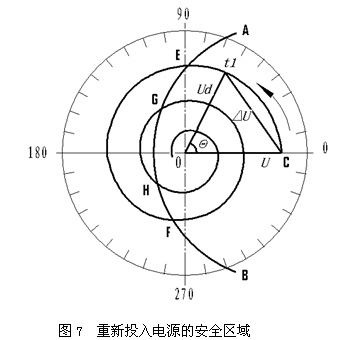
變頻器輸出電壓起始相位具有隨機性,只是保證了相與相之間的電壓相位差為120°。當其輸出頻率上升到50Hz后,進行變頻轉工頻的切換,如果該時刻變頻器的輸出正好與工頻電源的相位相差180°,切除變頻后立即投入工頻,△U將達到近兩倍的工頻電壓,遠遠超過了其允許電壓的1.33倍。△U過大將產生很大的沖擊電流,直接作用于切換系統和電動機,這不但導致切換失敗,甚至可能導致電機和切換系統的損壞。假設在切換時刻變頻器輸出的相位與工頻電源是相同的,在圖7中,以C為圓心,以1.33U為半徑繪出A-B,其右側為投入工頻電源的安全區域。這樣我們就得到C-E、F-G、H點以后三個安全投入工頻電源的時間范圍。
3.解決方案
所有的切換都應保證,變頻器拖動和工頻電源拖動電動機的轉向應該是一致的。通過以上分析可以看出C-E、F-G、
H點以后三個安全投入工頻電源的時間范圍,都是由相位和幅值共同作用的結果。我們也還可以分別從相位和幅值兩個方面入手來尋求解決辦法。
方法一:設法降低感應電動勢的幅值,待其降到其幅值小于0.33U后切入工頻。
方法二:選擇合適的時刻,在電動機感應電動勢的相位與工頻電源的相位差值較小的時刻切入工頻電源。
在前面的分析中知道電機承受的電壓Um=△U×Xm/(Xm+Xs)。如在回路中串入一電抗承擔一定得電壓,使電動機承擔的電壓在允許范圍之內,這樣就得到了另一種方法:
方法三:在回路中串入電抗,延時后將其短路掉。
3.1降低感應電動勢的幅值
依賴時間的推移來降低電動勢幅值的方法是不可取的。因為隨著時間的推移,轉速也在快速的下降,轉差的增大將不太有利于啟動電流的減小。對圖1的切換控制主電路進行優化,得到如圖8所示的切換控制主電路2。
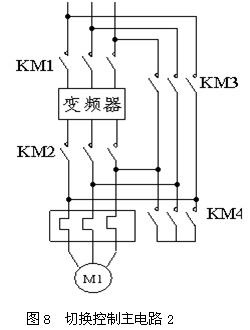
切換過程如下:
(1) 斷開接觸器KM2,切斷電動機與變頻器之間的聯系;
(2)
接通接觸器KM4,為電動機感應電動勢提供釋放通路;
(3) 斷開接觸器KM4;
(4)
接通接觸器KM3,將電動機投入到工頻電源上。
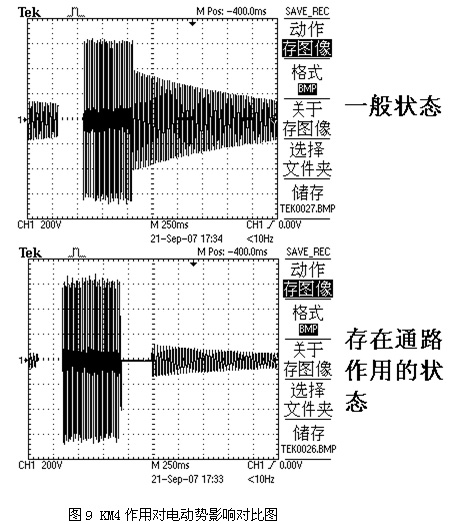
圖9是
KM4作用對電動勢影響對比圖。由圖9可以看出,KM4提供通路的作用時間約為300ms,作用后該時刻與一般狀態同一時刻的感應電動勢幅值相比幅值小了很多。適當控制KM4的作用時間,讓其幅值減小到額定電壓的三分之一以下就可以了。這樣,即使切換至工頻電源時刻感應電動勢與工頻電源的相位相差180°,△U也不會超出其許可的安全范圍了。在KM4的作用過程中,會加快電機的轉速下降,但通過試驗得知,KM4的作用對電機轉速的影響比對感應電動勢幅值的影響要顯得多。
此方法簡單易行,安全可靠,成本增加較小,但仍存在不小的電流沖擊。通過試驗和現場測試,此種切換方法的沖擊電流約為額定電流的3-5倍。
3.2在回路中串入電抗
其電路如圖10所示。
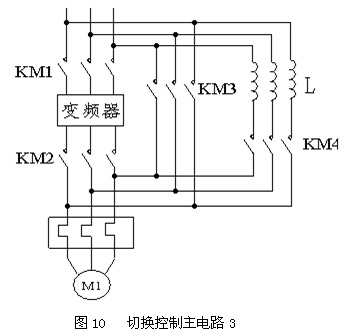
切換過程如下:
(1) 斷開接觸器KM2,切斷電動機與變頻器之間的聯系;
(2)
接通接觸器KM4,在電源與電機間串入L;
(3) 接通接觸器KM3,將L短路掉,將電動機投入到工頻電源上。
(4)
斷開接觸器KM4;完成切換
通過合理設計的L參數,電機分擔的電壓就可以控制在允許范圍之內,順利完成切換。
此切換方法控制簡單,較為安全。但電抗器體積龐大,成本增加較多。沖擊峰值較大,但持續時間短。通過試驗和現場測試,此種切換方法的沖擊電流峰值約為額定電流的4-5.5倍。
3.3相位檢測
該方法應首先保證KM2的斷開時刻變頻器的輸出與工頻電源是同相位的。圖7中C-E時間的長短取決于感應電動勢頻率的變化,而感應電動勢的頻率是由電機的轉速決定的。斷電后電機及其拖動系統處于自由制動過程。根據電力拖動原理,在自由制動過程中,轉速的基本表達式是:
(1)
式中:
n-t秒時刻的轉速;
n1-電動機停機瞬間的轉速;
τp-電機拖動系統的機械時間常數,其大小主要和拖動系統的慣性大小有關。
按照過渡過程的一般規律,拖動系統的機械時間常數τp約為系統自由停機時間的三分之一。各種系統自由停機的時間是不同的,有的自由十幾秒的時間,而有的就長達十幾分鐘甚至幾十分鐘。在停機時間較長的系統中,在同相位時刻斷開KM2接通KM3,可以比較容易的在C-E的時刻內完成。因為其時間較長,接觸器KM2、KM3的動作時間可以忽略。但在停機較快的系統中,必須考慮接觸器的動作時間。接觸器的動作時間往往決定著切換控制的成敗。
因感應電動勢的頻率與電機轉速是成正比關系,所以在自由制動過程中,電動機感應電動勢的基本表達式可依據公式(1)寫成:
(2)
式中:
f-t秒時刻的轉速;
f1-電動機停機瞬間的轉速;
τp-電機拖動系統的機械時間常數
由公式曲線分別作出τp=20s、60s、120s的電動機感應電動勢頻率衰減曲線,如圖11所示。
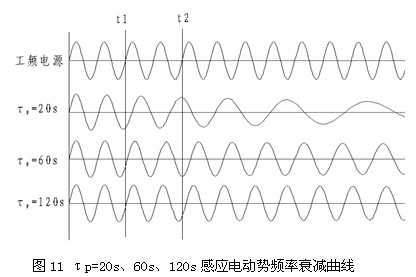
由圖11可以看出隨著時間的推移,感應電動勢的相位與工頻電源的相位逐漸拉開,τp越小拉開越快,τp=20s的t1時刻僅比初始動作時間推遲了40ms的時間,但與工頻相比相位差已經幾乎達到了90°,這時的△U就會較大,有可能造成切換的失敗。但τp=120s的t1時刻比初始動作時間推遲了80ms的時間,與工頻相比相位差只有60°左右,△U就不會超過工頻電源電壓,可以安全的切換。通過以上分析可知,該切換方法對停機過程較長的系統可以比較容易得實現,而停機過程較短的系統就不太適用了。
4
JD-BP系列變頻-工頻軟切換裝置
山東新風光電子科技發展有限公司在此理論基礎上,開發出了JD-BP系列變頻-工頻軟切換裝置。該裝置運用了提前切換的控制思想,在大量試驗和現場測試的基礎上成功解決了電動機變頻與工頻的切換問題。運用該裝置的大慣性的切換系統,在轉換瞬間幾乎看不到電流的波動,電動機及其拖動系統無振動現象。在降速過程較快的供水系統中切換瞬間的最大沖擊電流的峰值也被控制到了1.5倍的額定電流以下,取得了令人滿意的效果,本裝置已被國家知識產權局評定為實用新型國家專利。現介紹如下:
4.1
提前切換的目的
該裝置對通過檢測相位的方法進行了完善,采用在提前動作的方法來彌補接觸器動作的延遲。變頻器的輸出和工頻電源如果都是絕對的50Hz,那么兩者之間的相位差是固定不變的,這樣就談不上相同相位的時候切換。即使由于兩者的誤差而引起出現同相位的時刻,也會因其隨機性太大,而不能用到實際的控制中。在實際的應用中,將變頻器的輸出頻率稍微調高一些,這樣就可以比較容易地得到它與工頻電源同相位的時刻了。并且在每一個同相位時刻來臨之前,變頻器輸出電壓的相位總是超前于工頻電源相位的。在該段時間的某一時刻斷開變頻器的輸出,則該時刻電動機感應電動勢的相位也是超前于工頻電源的。隨著切換過程的推移,電動機感應電動勢的頻率逐漸下降,這樣在與工頻電源同相位的前后時刻順利地投入了工頻電源,從而順利完成了電動機從變頻運行到工頻運行的切換。雖然有些系統中提高電機的轉速會對系統產生影響,但由于頻率提升很小,而且切換過程短,所以其影響可忽略。
4.2切換過程
當系統中的變頻器運行到50Hz時,并且經過確認需要向工頻切換時,軟切換裝置開始檢測工頻電源與變頻器輸出的相位,根據調試時的設定,同時變頻器根據調試時的設定升高一定的頻率,頻率到達后系統再向軟切換裝置發出切換命令。軟切換裝置在得到系統發出的切換指令后,捕捉到同相位時刻前的設定時刻時,命令系統斷開接觸器KM2,接通接觸器KM3。兩接觸器之間是互鎖的,但兩者之間并沒有人為的延時,得到的切換命令是同時的。
4.3
效果分析
圖12是依據τp=20s的系統的電動機感應電動勢的等效曲線與工頻電源的相位比較圖。
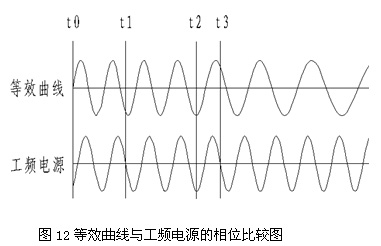
圖12中等效曲線的t0-t1階段是變頻器輸出在50.5Hz時的等效曲線,t1右側是斷開變頻器后電動機感應電動勢的頻率衰減曲線。由此圖可以看出t1時刻兩者的相位差也只有60°左右,t3時刻兩者的相位差也只有不到60°,考慮到接觸器動作的延遲,在t3時刻之前投入工頻電源是安全的。通過調整我們可以在t2時刻前后較小的范圍內投入工頻電源,這樣可以將△U降到最小。同時由于整個的過程沒有延遲,切換時間短,再加上頻率的升高,電機轉速下降極少,更有利于減小沖擊電流。
該裝置電路簡單,附屬電路少,抗干擾能力強,切換效果好,可適用于各種變頻-工頻轉換的系統。

魯公網安備 37083002000095號
魯ICP備19001210號-1 Copyright ? 2020 All Rights Reserved




